372
1
Статья написана с целью разъяснения основных терминов, данное оборудование продаётся на рынках вместе с лопатами и метизами, имеет очень широкое распространение в бытовых и промышленных целях. Cерводвигатели (сервомоторы) используются повсеместно в составе более крупного оборудования. Сейчас они весьма надёжны, но любая техника может выйти из строя, поэтому поговорим и про ремонт серводвигателей.

Асинхронные серводвигатели получили широкую известность за свою непритязательность к условиям работы и технологичность. Обладают небольшой массой, скромными габаритами и привлекательной себестоимостью, легки в обслуживании. Такое электрооборудование выгодно выделяется. В 90-е годы начинается активное применение синхронных сервомоторов, но и сейчас асинхронный серводвигатель сохраняет свою долю в массовом использовании, особенно в промышленности.
Более углубленное изучение нелинейных систем элементы которых перемещаются друг относительно друга было бы очень долгим. Токи, потокосцепления, напряжения представляют собой изменяемые векторные величины. Они называются частота, амплитуда и фаза. Всё это изучается в теории электрических машин.
Асинхронным двигателям свойственна значительная нелинейность. Магнитный поток и намагничивающий ток связаны между собой. Сопротивления роторной цепи определяются температурой и частотой.
Чтобы определить нагрузку асинхронного серводвигателя, требуется помимо сопротивлений схемы замещения ещё знать и другие переменные. Потребуются напряжения, частоты, скольжения.
Чтобы выполнять дальнейшие расчёты с изучением и прогнозированием режимов работы следует знать математические выражения зависимости скольжения и внутренних параметров, а также режимов его работы.
Для частотно-управляемого торможения тормозной режим работы так же важен как двигательный. Допускается применять механику, при этом частотное управление позволяет осуществлять торможение привода с помощью электричества, а это во многом выгоднее.
Асинхронный серводвигатель возможно применять в качестве двигателя, либо в трёх режимах торможения. Эти три режима различаются между собой тем как движутся потоки энергии. У них разное направление.
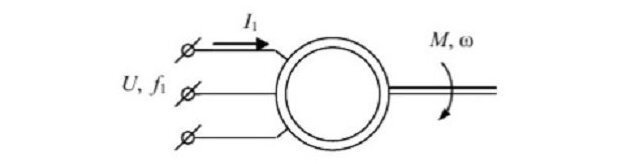
Режим двигателя предполагает передачу мощности от источника электроэнергии к валу двигателя. Магнитное поле при этом вращается и дублирует направление вала машины. Скорость вращения поля больше скорости вращения вала.
Чтобы управлять асинхронным серводвигателем, не производят регулировку напряжения статора, вместо этого, его(напряжение) меняют вместе с частотой напряжения, которое подаётся на статор. При этом основными параметрами являются U/F и U/(F в квадрате). В преобразователе частоты или сервоприводе выбирается вид характеристики по которой управляется серводвигатель.
Чтобы создать синусоидальный ток статор применяют скалярный и векторный способ формирования напряжения. Самым выгодным является векторный режим. Он даёт возможность получить увеличенную амплитуду входного напряжения, по сравнению со скалярным.
Управление напряжением статора ведёт больше не к регулированию крутящего момента, а скорее к изменению статического запаса крутящего момента.
Дополнительно планирую рассмотреть ремонт серводвигателей в домашних условиях и процесс работы в специализированных организациях.
Более углубленное изучение нелинейных систем элементы которых перемещаются друг относительно друга было бы очень долгим. Токи, потокосцепления, напряжения представляют собой изменяемые векторные величины. Они называются частота, амплитуда и фаза. Всё это изучается в теории электрических машин.
Асинхронным двигателям свойственна значительная нелинейность. Магнитный поток и намагничивающий ток связаны между собой. Сопротивления роторной цепи определяются температурой и частотой.
Чтобы определить нагрузку асинхронного серводвигателя, требуется помимо сопротивлений схемы замещения ещё знать и другие переменные. Потребуются напряжения, частоты, скольжения.
Чтобы выполнять дальнейшие расчёты с изучением и прогнозированием режимов работы следует знать математические выражения зависимости скольжения и внутренних параметров, а также режимов его работы.
Для частотно-управляемого торможения тормозной режим работы так же важен как двигательный. Допускается применять механику, при этом частотное управление позволяет осуществлять торможение привода с помощью электричества, а это во многом выгоднее.
Асинхронный серводвигатель возможно применять в качестве двигателя, либо в трёх режимах торможения. Эти три режима различаются между собой тем как движутся потоки энергии. У них разное направление.
Режим двигателя предполагает передачу мощности от источника электроэнергии к валу двигателя. Магнитное поле при этом вращается и дублирует направление вала машины. Скорость вращения поля больше скорости вращения вала.
Чтобы управлять асинхронным серводвигателем, не производят регулировку напряжения статора, вместо этого, его(напряжение) меняют вместе с частотой напряжения, которое подаётся на статор. При этом основными параметрами являются U/F и U/(F в квадрате). В преобразователе частоты или сервоприводе выбирается вид характеристики по которой управляется серводвигатель.
Чтобы создать синусоидальный ток статор применяют скалярный и векторный способ формирования напряжения. Самым выгодным является векторный режим. Он даёт возможность получить увеличенную амплитуду входного напряжения, по сравнению со скалярным.
Управление напряжением статора ведёт больше не к регулированию крутящего момента, а скорее к изменению статического запаса крутящего момента.
Дополнительно планирую рассмотреть ремонт серводвигателей в домашних условиях и процесс работы в специализированных организациях.
Источник:
Ссылки по теме:
- Современная модница угадывает треки
- Ледяная горка длиной 521 метр
- Когда попросили не накручивать себя
- Ничего необычного, просто ворона выгуливает крысу
- Как не потерять девушку в толпе
Метки: асинхронный серводвигатель ремонт серводвигателя ремонт сервомотора серводвигатель сервомотор
реклама














































































{kind=link}